

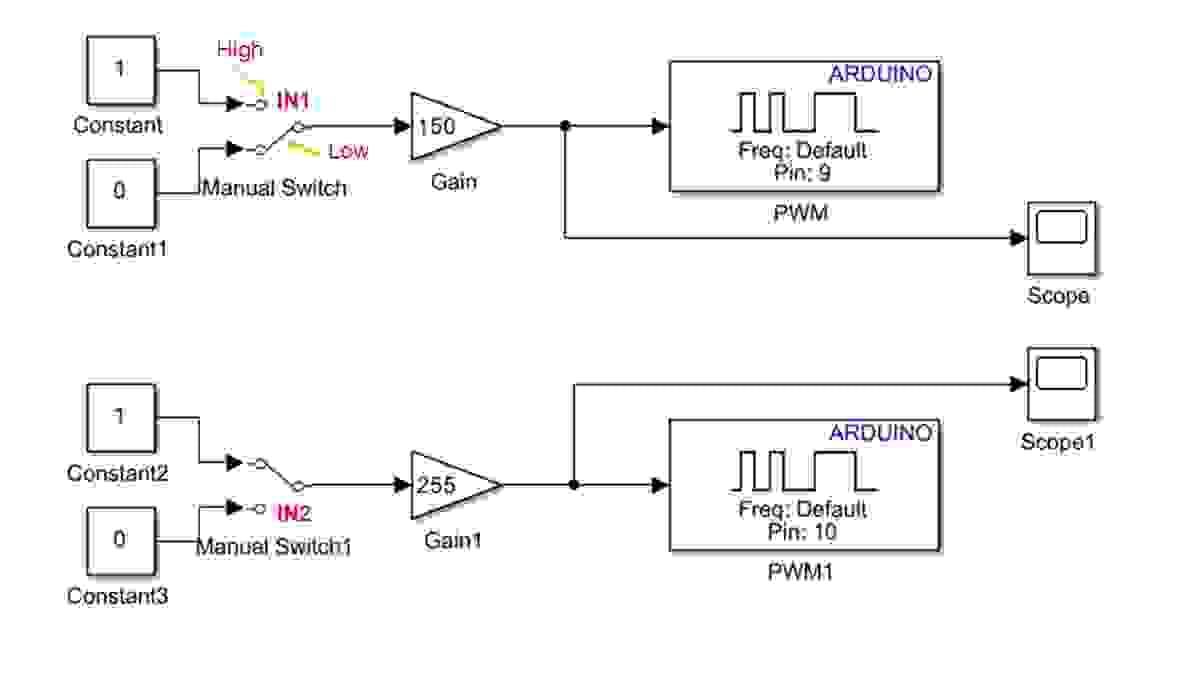
3. Simulink Setup
The Simulink block diagram for the H-bridge algorithm design is given, with the logic used for controlling the 'forward' and 'reverse' motion of the DC motor. Please note
that to implement this in real-time on a physical system, the switches would
need to be external, or logic built into Simulink. Based on the electronic circuit set-up
provided above, the operation of the H-bridge polarity ‘control’ operates as
follows:
1. ClockwiseMotion- Set IN1 to High
- Set IN2 to Low
2. CounterclockwiseMotion
- Set IN1 to Low
- Set IN2 to High
3. Stop Motion
- Set both IN1 and IN2 to Low
- Set both IN1 and IN2 to High
Once, set-up and operating withinSimulink, perform the following:
- Changethe switches as detailed above and view the scopes to explore how the signals are changing
- Asthe PWM has values between 0 and 255 (150 and 255 are initially given below),
investigate changing the numbers within the gain blocks to alter the speed of
the DC motor.

Powered By